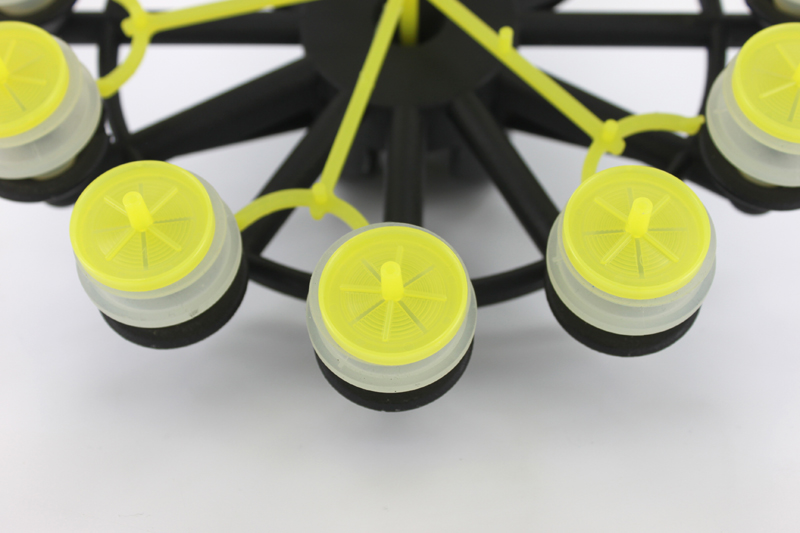
 Leichtbau Roboterhand aus Polyamid mit kleinen Filtersieben (Foto: ASS)
Leichtbau Roboterhand aus Polyamid mit kleinen Filtersieben (Foto: ASS)
Smarte Lösung – Lasergesinterte Roboterhand aus Polyamid
01.09.2014 / ASS. Die Theo Hillers GmbH aus Kall in der Eifel war auf der Suche nach einer Lösung für die Handhabung von Filtersieben und deren Angüssen, angedockt auf ein Angussentnahmegerät (oft auch Angusspicker genannt), für die sensible Pharmaindustrie.
Die Aufgabenstellung ließ die standardisierte Automatisierungstechnik hier an ihre Grenzen stoßen: Nutzung des vorhandenen Angusspickers, viele kleine Kavitäten auf engstem Raum, eine Steigerung der Qualität, begrenzter Raum und ein Maximalgewicht der einzusetzenden Roboterhand von circa 500 Gramm, bei gleichzeitiger Reduzierung der Gesamtkomplexität.
Die ASS Maschinenbau GmbH aus Overath nahm sich der Aufgabenstellung an. Im ASS PA-Forming, einem Selektiven-Laser-Sinter Verfahren (SLS) wurde eine ultraleichte Roboterhand aus Polyamid gefertigt und in das bestehende System integriert. Diese neuartige Leichtbau Roboterhand stellte die optimale Lösung für die Aufgabenstellung dar.
Bei der bisherigen Lösung wurde über einen Angusspicker der Anguss entnommen und die zwölf, beziehungsweise acht Filtersiebe als Fallteile auf ein Förderband abgeworfen. Der hier genutzte Angusspicker wird über ein zweiachsiges Linearhandling mit zusätzlicher Schwenkachse zum Anguss geführt. Um die Qualität der Produkte zu steigern und den Ausschuss zu minimieren durften die Filtersiebe nicht weiterhin als Fallteile behandelt, sondern mussten sauber entnommen und auf einem Förderband abgelegt werden.
Wo klassische Greifer an ihre Grenzen stoßen - Leichtbau aus Polyamid
Für die Umsetzung der Qualitätssteigerung waren zwei Lösungswege möglich:
1. ein komplettes neues Linearhandling mit einer klassischen Entnahme-Roboterhand aus Aluminium
2. eine Spezial-Lösung im Leichtbau um das bestehende Handling weiter zu nutzen
Aus Kostengründen sollte nach Möglichkeit das bestehende Handling weiter genutzt werden. Der Schritt zu einer neuartigen Roboterhandlösung bedurfte Pioniergeist und den Mut des Anwenders. Denn im Gegensatz zu den klassischen Roboterhänden aus den aluminiumbasierten Baukastensystemen gab es im Bereich der Leichtbau Roboterhände aus Polyamid kaum praxisbezogene Erfahrungswerte.
Bei der Anwendung von Polyamid-Komponenten in der Automation konnte ASS auf viele Erfahrungswerte zurückgreifen: zum Beispiel beim Einsatz von Teilkomponenten aus Polyamid bei Nadelgreifern und Greifzangen, bei Leichtbau Innengreifern und speziellen Konturstücken, sowie bei Parallel- und Foliengreifern.
Die Projektierung simulierte ein erstes 3D-Modell anhand der groben Eckdaten. Dieser theoretische 3D-Entwurf ergab, dass die Zielvorgaben mit einer Leichtbau Roboterhand aus Polyamid erreicht werden.
Das Selektive-Laser-Sinter Verfahren (SLS) bot für die gegebenen Rahmenbedingungen den bestmöglichen Lösungsansatz und ermöglichte die weitere Nutzung des vorhandenen Systems beim Kunden.
Den Konstrukteuren war somit die größtmögliche Konstruktionsfreiheit gegeben und ermöglichte neue Wege im Bau von Roboterhänden mit komplexen Geometrien.
Test und Optimierung - Konstruktionelle Herausforderungen
Die Produkte mussten über ein Vakuum mit Saugern entnommen werden. Daher wurden vor der eigentlichen Konstruktion des Greifers aus Polyamid umfangreiche Tests zur Saugkraftoptimierung durchgeführt: Die Roboterhände mussten über das erzeugte Vakuum acht, beziehungsweise zwölf Kavitäten ansaugen und auch halten können.
Die Tests zur Saugkraftoptimierung ergaben, dass die 12-fach Roboterhand vier Luftkreise für je drei Artikel und für die 8-fach Roboterhand vier Luftkreise für je zwei Artikel benötigte. Mit dem erfolgreichen Abschluss der Saugkraftversuche konnte die eigentliche Konstruktion im CAD des Robotergreifers beginnen.
Anhand der erarbeiteten Ergebnisse konnte der Konstrukteur die Luftführungen für die Roboterhände, entsprechend des jeweiligen Bedarfs in die CAD Daten integrieren. Diese innenliegenden Luftführungen boten in der Anwendung den Vorteil, dass kein zusätzliches Gewicht für Luftschläuche anfiel und dass die Roboterhand wesentlich aufgeräumter war.
Um weiteres Gewicht einzusparen wurde auf die Messing-Adapter der Saugnäpfe verzichtet und stattdessen die Anbindungen für die Vakuumsauger ebenfalls direkt in die Roboterhände konstruiert. Die integrierten Anbindungen für die Vakuumsauger ermöglichen so einen unkomplizierten Wechsel der Sauger. In der späteren Anwendung reduziert sich die Rüstzeit der Automation dadurch, dass beim Saugerwechsel die Sauger direkt von der Roboterhand gezogen und wieder neue aufgesteckt werden können.
Die Herausforderung an den Konstrukteur lag nun darin, die Anzahl der Kavitäten, die Luftführungen, die Anbindung an das Linearhandling und die Entnahmevorrichtungen so zu kombinieren, dass die Grenzen von Gewicht und Platz nicht überschritten werden und die Roboterhände zugleich stabil und sicher vor Ermüdungsbrüchen sind.
Um der mechanischen Anbindung der Roboterhand an das Handling zusätzliche Stabilität zu bieten wurde hier eine klassische Adapterplatte aus Aluminium genutzt. Die Integration der Adapterplatte an das Bauteil aus Polyamid optimierte die Stabilität. Das Ergebnis des 3D-Modells wurde in der Konstruktionsabteilung vor dem Lasersintern erfolgreich einer Belastungsanalyse unterworfen.
Nach erfolgreich bestandenen Tests wurde das fertige 3D-Modell über Nacht im Selektiven-Laser-Sinter Verfahren auf der PA-Forming Anlage gefertigt. Nach der Entnahme und die Reinigung vom Polyamid Pulver am folgenden Morgen wurden Vakuumsauger, Anschlüsse für die Luftzuführung und Greifzange montiert. Die Fertigstellung einer solchen Polyamid-Roboterhand ist nach erfolgreicher Konstruktion und je nach Komplexität quasi über Nacht möglich.
Erfolgreiche Inbetriebnahme – Mit Leichtigkeit greifen
Der mutige Schritt zur individuellen Leichtbau Roboterhand wurde belohnt. Die neuartigen Roboterhände erfüllten die engen Rahmenbedingungen an Abmessungen und Gewicht und wurden erfolgreich in Betrieb genommen.
Mit diesen sehr leichten und kompakten Bauweisen der Roboterhände wurde die Prozesssicherheit gesteigert: Die Greifer reduzieren den Ausschuss der Produkte, da diese nun im Arbeitsablauf nicht mehr als Fallteile ausgeworfen, sondern auf dem Förderband abgelegt werden und so einer geringeren Verschmutzung ausgesetzt sind. „Bereits unmittelbar nach Inbetriebnahme der lasergesinterten Roboterhand konnten ablagebedingte Fehler an den Filtersieben nicht mehr beobachtet werden“. Herr Tobias Klinkhammer, Leiter Spritzgießfertigung der Theo Hillers GmbH lobt die erfolgreiche Inbetriebnahme der Roboterhand: „Diese Lösung abseits der konventionellen Systeme aus Aluminiumprofilen hat unsere Erwartungen im Handling und unser Ziel, den Ausschuss zu reduzieren erfüllt.“
„Wir freuen uns, dass wir gemeinsam diesen neuen Weg im Greiferbau gegangen sind und den Mut aufgebracht haben, diese unkonventionelle Lösung umzusetzen“, so Sascha Fendel, zuständiger Projektbetreuer der ASS Maschinenbau GmbH.
„Der erfolgreiche Einsatz der Leichtbau Roboterhände zeige, dass für besondere Anforderungen auch besondere Lösungen benötigt werden und diese auch realisierbar sind“, ergänzt Reinhold Ziewers, Geschäftsführer der ASS Maschinenbau GmbH.